

Live 방송 시청 및 Online 방송 시청 시
- Live 방송 시청 시 시작일 4일 전까지 신청 하셔야 합니다.
- Live 방송 시청 및 Online 시청은 Membership 내정보 / 강의보기 에서 신청하신 과정을 보실 수 있습니다.
- Live 방송 및 Online 시청은 신청 인원에 제한이 없습니다.
강의 소개
본 특강은 실제 자율주행차량을 개발하고자 하는 경우 하드웨어 및 소프트웨어 개발자가 갖추어야 하는 기본 지식들에 대해 소개합니다.
자율주행차량에 요구되는 DC-DC 컨버터, DC-AC 인버터, 역기전력 방어 회로에 대해 간략히 소개하고, 차량의 눈과 귀가 되어주는 라이다, 레이더, 카메라 등의 신호 처리 소프트웨어 개발에 대해 소개하며, 페이징 메커니즘이 있어서 오히려 성능을 낭비한다고 생각될지 모르는 리눅스 같은 범용 운영 체제가 어째서 메모리에 다이렉트로 맵핑되는 MCU보다 대규모 데이터 처리에 적합한지에 대해 소개하는 시간 또한 가질 예정입니다.
추가적으로 이를 개발할 때 필요한 딥러닝 지식에 대해서도 간략하게 소개하는 시간을 가지겠습니다.
짧은 시간이지만 첨단 기술 개발에 필요한 개요 및 흐름들을 얻는 귀중한 시간이 될 수 있을 것이라 판답합니다. 많은 참여 부탁드립니다.
[특강 요약]
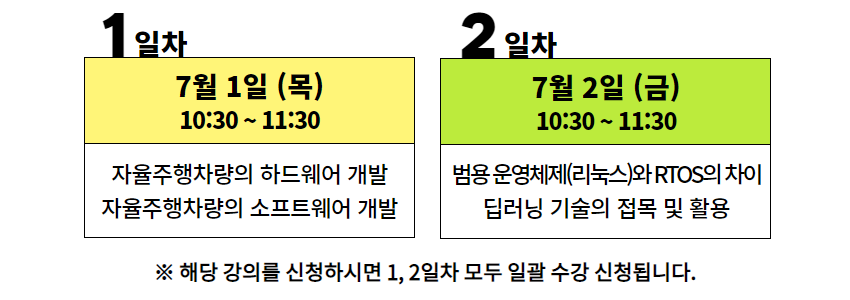
- 자율주행차량의 하드웨어 개발 개요
- 자율주행차량의 소프트웨어 개발 개요
- 범용 운영체제와 RTOS의 차이 및 메모리 관리 차원의 차이점
- 딥러닝 기술이 어떻게 접목되고 활용되는가
- 실제 통합 테스트를 할 때 발생했던 문제점들과 해결 방안
자율주행차량에 요구되는 DC-DC 컨버터, DC-AC 인버터, 역기전력 방어 회로에 대해 간략히 소개하고, 차량의 눈과 귀가 되어주는 라이다, 레이더, 카메라 등의 신호 처리 소프트웨어 개발에 대해 소개하며, 페이징 메커니즘이 있어서 오히려 성능을 낭비한다고 생각될지 모르는 리눅스 같은 범용 운영 체제가 어째서 메모리에 다이렉트로 맵핑되는 MCU보다 대규모 데이터 처리에 적합한지에 대해 소개하는 시간 또한 가질 예정입니다.
추가적으로 이를 개발할 때 필요한 딥러닝 지식에 대해서도 간략하게 소개하는 시간을 가지겠습니다.
짧은 시간이지만 첨단 기술 개발에 필요한 개요 및 흐름들을 얻는 귀중한 시간이 될 수 있을 것이라 판답합니다. 많은 참여 부탁드립니다.
[특강 요약]
- 자율주행차량의 하드웨어 개발 개요
- 자율주행차량의 소프트웨어 개발 개요
- 범용 운영체제와 RTOS의 차이 및 메모리 관리 차원의 차이점
- 딥러닝 기술이 어떻게 접목되고 활용되는가
- 실제 통합 테스트를 할 때 발생했던 문제점들과 해결 방안
강의 구성
자율주행차량의 하드웨어 개발
- DC-DC 컨버터
- DC-AC 인버터
- AC-AC 사이클로
각각의 전력 변환 기술들이 차량에서 어떻게 활용되는지 살펴봅니다.
자율주행차량의 소프트웨어 개발
- FFMPEG과 Codec
- Digital Signal Processing
- Math + Physics + 수치해석
FFMPEG을 통한 동영상 및 스트리밍, 신호 처리 기술, 디지털 특성에 따른 직접 개발한 수치 해석 라이브러리의 필요성과 생산성 관점에서의 접근법을 소개합니다.
범용 운영체제(리눅스)와 RTOS의 차이
- Paging(페이징) 메커니즘
- 페이징과 대규모 데이터 처리
- LRU 알고리즘
페이징 메커니즘의 간략한 소개와 swap 파티션의 필요성, 그리고 대규모 데이터 처리에서의 이점에 대해 설명합니다.
딥러닝 기술의 접목 및 활용
- Python, TensorFlow, Keras
- C++ 고수는 여전히 필요하다
프로토타입 테스트를 위해 생산성이 높은 파이썬, 텐서플로, 케라스 등을 활용한 신호 처리 기술에 대해 소개하며, 견고성과 성능이 중요한 분야에서 C++ 변환이 필요함에 대해 설명합니다.
강사 소개

이상훈대표
현) 에디로봇아카데미
약력 및 전문 분야
2020년 창조경제혁신센터 주관 사업 최우수 달성
에디 로봇 아카데미 운영
Binary Translator 컴파일러 개발
삼성전자 무선사업부 IoT 교육 외 다수 기업 교육
FPGA 기반 초고속 데이터 처리 서버 개발
차량용 임베디드 리눅스 시스템 개발
차량용 레이다 신호처리 S/W 개발
DC-DC 컨버터 설계
FPGA 기반 모터 제어 외주 개발
TMS570, STM32, NXP 펌웨어(RTOS포함) 개발
임베디드 마스터 과정 및 자율주행 과정 강의(비트교육센터, 한국아이티기술, 헤스트, 한국산업기술대 외 다수)
과학기술정보통신부 혁신성장 인공지능 전문 교육(비트교육센터)
웹 애플리케이션 개발 과정 교육(비트교육센터, KH정보교육원)
에디 로봇 아카데미 운영
Binary Translator 컴파일러 개발
삼성전자 무선사업부 IoT 교육 외 다수 기업 교육
FPGA 기반 초고속 데이터 처리 서버 개발
차량용 임베디드 리눅스 시스템 개발
차량용 레이다 신호처리 S/W 개발
DC-DC 컨버터 설계
FPGA 기반 모터 제어 외주 개발
TMS570, STM32, NXP 펌웨어(RTOS포함) 개발
임베디드 마스터 과정 및 자율주행 과정 강의(비트교육센터, 한국아이티기술, 헤스트, 한국산업기술대 외 다수)
과학기술정보통신부 혁신성장 인공지능 전문 교육(비트교육센터)
웹 애플리케이션 개발 과정 교육(비트교육센터, KH정보교육원)
강의장 안내주소 : 서울 금천구 디지털로 178 (가산동) 가산퍼블릭 A동 1823호